Abstract
The ANU-Optus Bushfire Research Centre of Excellence is developing a novel, integrated, hi-tech solution to detect bushfires early with an approach that combines different remote sensing platforms including satellites, long endurance uncrewed vehicles (drones), cameras on fire towers and ground sensors in the Australian Capital Territory. The different methods and technologies are evaluated using planned, unplanned and experimental ignitions to determine under which scenarios each technology is most effective and the extent to which they outperform or complement current practices.
Introduction
Spotting and attacking fires early is paramount to improving emergency response time and reducing the risk of large-scale bushfires. This is especially true in remote terrain where extensive areas can quickly burn under extreme fire weather and dry fuel conditions. In Australia, when it comes to fire detection, we heavily depend on 000 calls from the public mainly around urban areas, intermittent surveillance efforts from people in towers who can be exposed to health and safety issues, and the deployment of manned, fire-spotting aircraft over lightning-strike areas. These are often delayed because of resourcing issues or restrictions on night flying operations.
Regarding early bushfire detection, there is not a single technique that can do the job of inspecting large areas and detecting small bushfires. Existing satellites can provide surveillance across Australia but may not identify small ignitions given current spatial and temporal resolution and will fail to detect ignitions during cloudy conditions. Long-endurance drones can fly below clouds for up to 10 hours, overcoming satellite limitations. Cameras on towers and on-ground sensors have limited spatial coverage per camera or sensor network but can be located in areas of elevated risk or conservation value. Only a system that combines all the technologies may be able to detect small fires. This work explores some approaches.
Methods
Different methods and technologies for early fire detection are under development, implementation and evaluation within the ACT Rural Fire Service and in collaboration with ACT Parks and Conservation Service as a proof-of-concept. Further deployments of this capability will roll out to other jurisdictions (Figure 1).
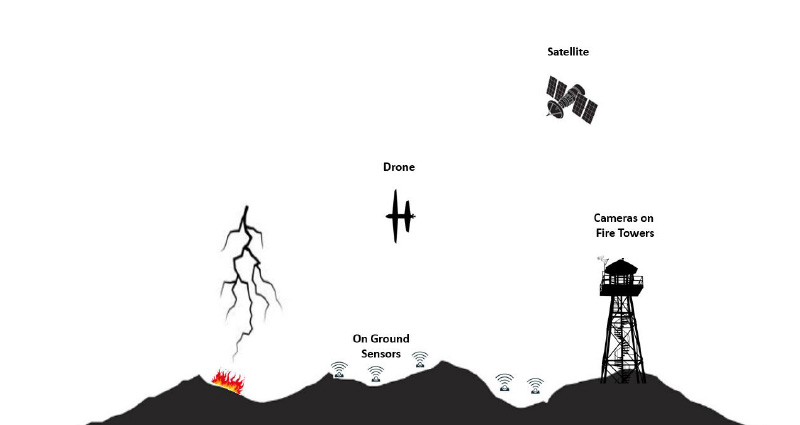
Figure 1: Integrated approach to bushfire detection under implementation and testing in the ACT. The system combines different remote sensing platforms including satellites, long endurance drones, cameras on fire towers and ground sensors.
Ground sensors
A scalable ground-based Internet of Things fire detection system using low-power wireless sensor devices is under development. The network will also provide situational awareness for reporting and predicting fire risk and fire movement.
Cameras on fire towers
State-of-the art approaches that are publicly available for bushfire detection have been reviewed and compared. A novel learned smoke segmentation method inspired by physics-based image dehazing methods has been developed using a Convolutional Neural Network (Yan, Zhang & Barnes 2020). More specifically, the smoke segmentation approach separates pixels by modelling the contribution to the colour of each pixel from light reflected from smoke, and light from the actual background (e.g. the forest). The approach explicitly estimates the uncertainty of classification using a generative approach (Zhang 2020).
Drones
Long-range drones are being tested for fire spotting. Drones that can fly at night over an area affected by dry lightning strikes and determine how many of those strikes resulted in ignitions and track the spread of those ignitions. This provides a potentially significant capability enhancement to existing fire management practices. This drone capability has started to be tested in the ACT.
Inspection of lightning events during lightning storms from the 2019–20 bushfire season has been simulated over a 100,000 km2 region along the east coast of Australia to test the feasibility of a swarm of drone solution to achieve the desired response time.
Satellite
Hotspot detection from existing satellite capability will be integrated into the system. The hotspot alerts will come from Geoscience Australia’s Sentinel system that integrates satellite data from several geostationary and polar orbit satellite systems. Italian software developers are working to develop a notification system for fire detections from multiple satellite systems.
Evaluation
The different methods and technologies implemented in the ACT are to be evaluated over the next 4 years using planned, unplanned and experimental ignitions. Ignitions will be stratified across a range of conditions that are expected to influence detection success including landscape position, vegetation structure (grassland/forest), weather conditions and times of the day (day/night). Detection technologies will be progressively incorporated in the evaluation as technologies come on stream and mature. This evaluation will help to determine under which scenarios each technology is most effective and the extent they outperform or complement current practices.
Results
Preliminary results achieved are summarised below for technologies advanced in implementation.
Cameras on towers
The results (Mean Squared Error per pixel averaged across all test images - mMse ranging from 0.12 to 0.14 depending on the datasets used for validation) significantly outperform all state-of-the art smoke segmentation models (mMse ranging from 0.21 to 0.34 depending on the model and dataset) leading to a higher rate of true positives than other approaches (Yan, Zhang & Barnes 2022). The proposed bushfire segmentation approach may also allow better automated estimation of the physical location of the fire including a fine-scale estimation of the edge of the smoke in the transition from thick to translucent smoke. The veracity of this hypothesis will be determined by the results of the evaluation project.
Drones
A suitable platform has been acquired from Carbonix, the Volanti, which provides an initial vehicle on which to undertake the first tranche of experimental tests and verification procedures. The Volanti has a maximum 2-hour flight time. The Volanti will be upgraded to the Domani vehicle in late 2022. The Domani vehicle has a 6–8-hour flight time and a slightly larger payload.
The initial tests of the Volanti have been completed. A thermal camera, a NextVision NightHawk2-UZ, is integrated and the first thermal video has been collected over experimental sources of heat and smoke (Figure 2). A Silvus mesh radio has been scoped and provided with the Volanti vehicle. This provides the capability for the data feed on the vehicle to be routed through the ACT Emergency Services Agency (ESA) mesh radio network that covers the entire ACT and provides radio communications capability throughout Namadgi National Park. The use of ESA’s radio network will both enable Beyond Visual Line of Sight (BVLOS) flight and enable us to stream thermal imagery directly to ACT Rural Fire Service.

Figure 2: Thermal infrared (top) and RGB (bottom) images of 3 different heat sources.
A severe storm from the 2019–20 bushfire season over a 100,000 km2 region in south-eastern Australia was simulated to verify the feasibility of a swarm of drone solution for bushfire detection. The storm contained approximately 4,000 strikes over 24 hours. Preliminary results indicate lightning inspection times of less than 15 minutes with 100 drones, and 5 minutes with 500 drones when regions of high lightning-strike density are forecasted an hour in advance to allow a pre-emptive increase in drone density over that region (Figure 3).
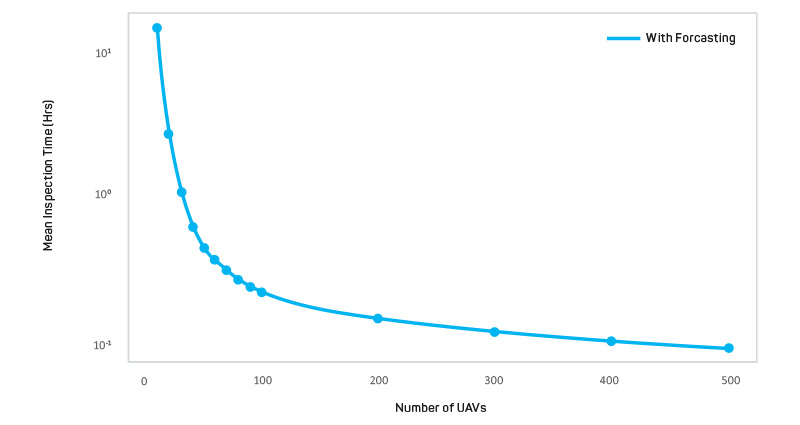
Figure 3: Mean inspection time for different sizes of the UAV swarm used to inspect the lightning strikes.
The ignition risk of a lightning-strike ignition depends on many local factors such as the fuel load and associated rain events. Thus, the algorithms can prioritise strikes with high-ignition risk to lower the inspection time of prioritised strikes. Lower inspection times for high-risk strikes are expected by prioritising inspection, and further modelling will be undertaken to further explore this aspect.
Evaluation
A dataset of ignitions in the ACT from 2012–21 has been compiled from Australian Incident Reporting System (AIRS) and Incident Control On Line (ICON) data provided by ACT ESA. The curation of this dataset provided insufficient information to identify trends in the proportion of ignitions detected by different detection sources. However, this process was beneficial in identifying and addressing issues associated with data collection before the commencement of the evaluation. The database of ignitions was also critical to understanding the sources of variation in ignition frequency and location. These data will be used to inform deployment of detection technologies and to specify conditions for experimental burns.
A safe, cost-effective and realistic way of replicating an unplanned fire ignition has also been identified to enable a more extensive evaluation, especially under fire weather conditions unsuitable for experimental ignitions. So far, we have successfully replicated a small fire using an artificial smoke machine (Figure 4). Smoke from this machine was identified via a fire tower operator, a fire observer monitoring a fire tower camera and imagery captured by the drone.

Figure 4. Small fire lighted by members of the ACT Rivers fire brigade (left). Smoke produced by the smoke machine (right).
Images: Nick Wilson (left) and Robert Mahoney (right)
Conclusions
Most ignitions in Australia, and many other fire-prone regions, are detected by the public or fire tower observers but current approaches are not always effective, especially during extreme weather and in remote, unpopulated locations. We must accelerate the development of modern technologies to meet this challenge, well ahead of future catastrophic bushfire seasons. Novel technologies such as those presented here may offer more efficient detection of ignitions. These technologies have the potential to reduce the resource demands associated with increasing ignition frequency caused by climate change.